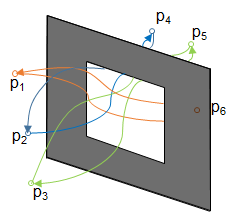
Planning the collision-free, simultaneous movement of multiple agents is a fundamental problem in multi-robot systems and becomes particularly challenging in highly confined environments. Hikmet Beyoglu addresses this problem in his master thesis by first searching for collision-free paths in a discretized environment and then optimizing the agents’ dynamically feasible trajectories […]