Over the course of the past years, drones have proven to be a capable tool in diverse civil domains, such as agriculture, construction, inspection, surveillance, search and rescue and even space exploration. Existing software tools for specifying and executing multidrone missions are limited to route planning or tightly coupled to specific drone hardware.
We introduce EAMOS (Execution of Aerial Multidrone Missions and Operations Specification Framework), which allows us to specify missions in an intuitive, text-based way and provides a mission compiler, a mission middle layer, and a distributed drone execution environment. The middle layer wraps the control of individual drone-specific capabilities, such as launch, fly to position, or perform a maneuver, into a public API that transparently utilizes the capabilities of numerous drone platforms. We exploit the Go programming language to implement key components of the framework and provide an interface for ROS-based drone platforms.
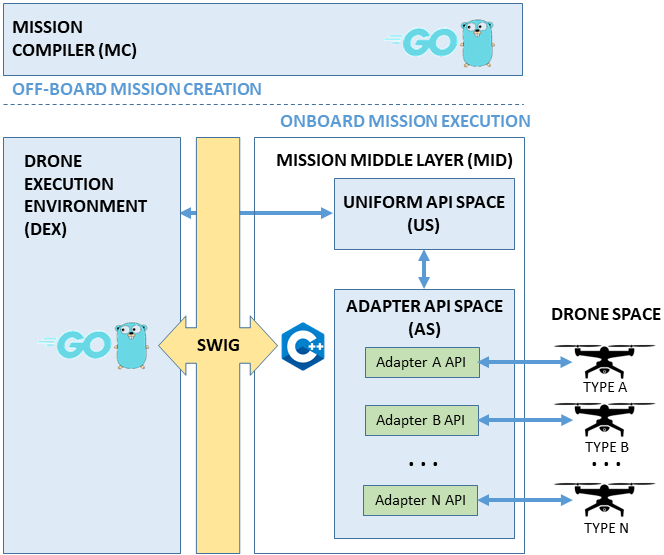
EAMOS automates the mission execution on real, virtual, and even hybrid robotic setups involving real and virtual drones. We demonstrate the successful deployment of EAMOS with four missions executed on Pixhawk/PX4-equipped quadcopters and virtual drones simulated with Airsim.
Publications
Markus Gutmann and Bernhard Rinner. EAMOS: Execution of Aerial Multidrone Mission Operations and Specifications Framework. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS). Warsaw, Poland, June 2023.
Markus Gutmann and Bernhard Rinner. Multidrone Mission Execution with EAMOS: From Text to Mission. IEEE Access. 11:125460-125491, 2023.