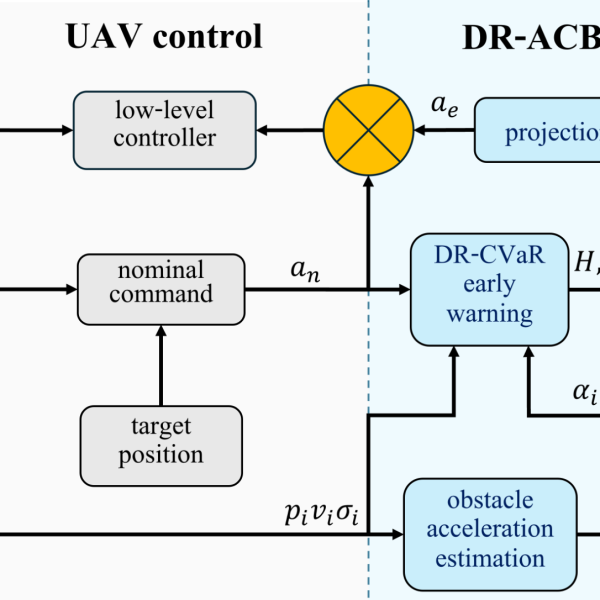
The following two papers have been recently published: Dnyandeep Mandaokar and Bernhard Rinner. Distributionally Robust Acceleration Control Barrier Filter for Efficient UAV Obstacle Avoidance. IEEE Robotics and Automation Letters. 11(5): 5914-5921, 2026.https://doi.org/10.1109/LRA.2026.3677752 We introduce the distributionally robust acceleration control barrier function (DR-ACBF) as an efficient collision avoidance method maintaining safety […]