The following two papers have been recently published:
Dnyandeep Mandaokar and Bernhard Rinner. Distributionally Robust Acceleration Control Barrier Filter for Efficient UAV Obstacle Avoidance. IEEE Robotics and Automation Letters. 11(5): 5914-5921, 2026.
https://doi.org/10.1109/LRA.2026.3677752
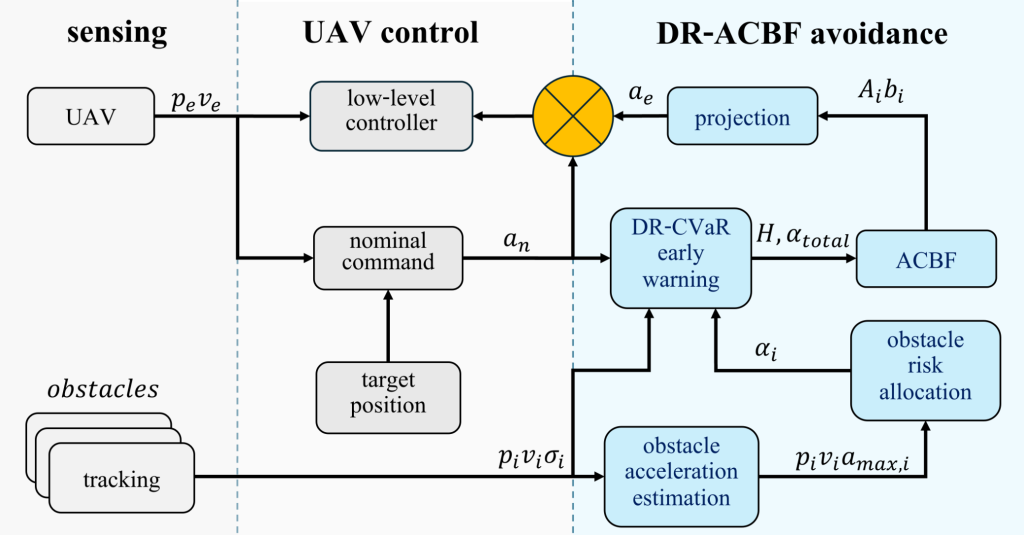
We introduce the distributionally robust acceleration control barrier function (DR-ACBF) as an efficient collision avoidance method maintaining safety regions. The method constructs a second-order control barrier function as linear half-space constraints on commanded acceleration. Latency, actuator limits, and obstacle accelerations are handled through an effective clearance that considers dynamics and delay. Uncertainty is mitigated using Cantelli tightening with per-obstacle risk. A DR-conditional value at risk (DR-CVaR) early trigger expands margins near violations to improve DOA. To meet real-time avoidance-control at 100 Hz, we use fixed-time Gauss-Southwell projections instead of quadratic programs (QP).
Daniel Johannes Bugelnig, Filip Lemic, Álmos Veres-Vitályos, Genís Castillo Gómez-Raya, Xavier Costa-Pérez and Bernhard Rinner. Adaptive Flight Planning for Neural 3D Reconstruction With Low-Altitude UAVs. IEEE Internet of Things Magazine. 2026 (early access).
https://doi.org/10.1109/MIOT.2026.3661300
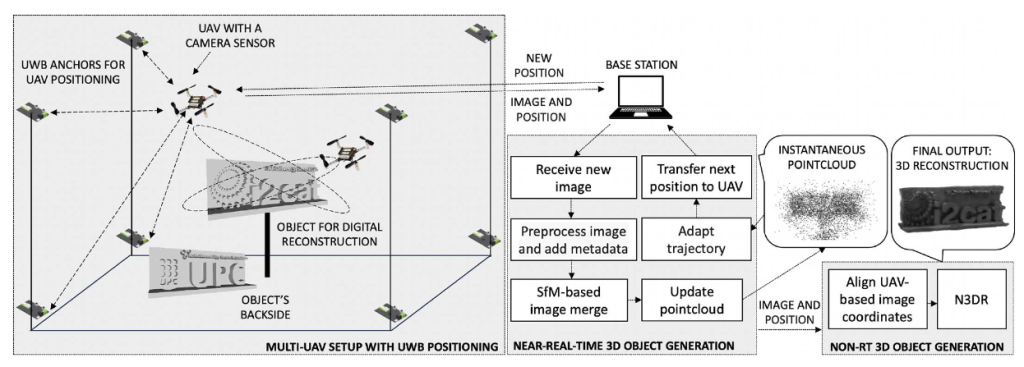
Contemporary advances in the Neural 3 Dimensional (3D) Reconstruction (N3DR) have enabled new possibilities for detailed scene understanding and immersive environment modeling. However, the quality of reconstruction remains heavily sensitive to viewpoint selection and flight trajectory, particularly in low-altitude Unmanned Aerial Vehicle (UAV) applications, where energy, time, and occlusions pose significant challenges. This article presents an intelligent and adaptive path planning framework that dynamically optimizes UAVs’ viewpoints to maximize neural reconstruction quality while respecting real-world constraints. Unlike static or heuristic approaches, our system integrates online feedback from the reconstruction engine to guide UAVs toward underexplored or uncertain regions in real time.