Unmanned aerial vehicles (UAVs) with onboard cameras are increasingly deployed in various applications including surveying, search and rescue, inspection as well as video production. In all these applications, the UAVs move – in many cases autonomously – to capture imagery of sufficient quality of the environment or objects of interest. Matthias Weyrer and Bernhard Rinner have formually introduced the multi-coverage problem for teams of UAVs, where all visible surfaces of a given 3D environment must be covered by simultaneously captured images from at least k different viewpoints. In their recent paper, they present an approach for efficiently planning the motion of the individual UAVs and controlling its execution.
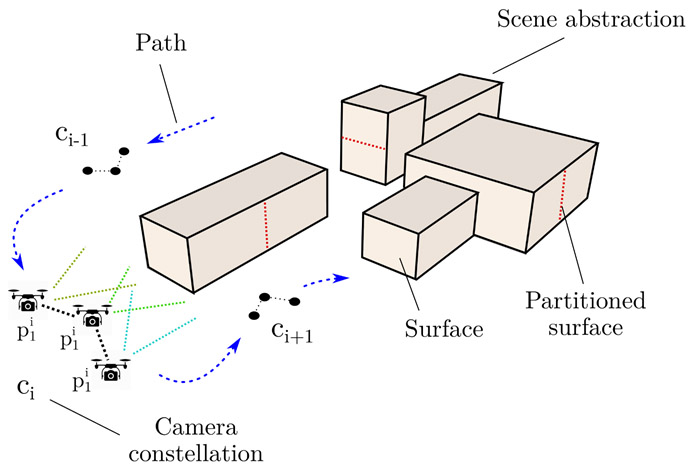
Bernhard Rinner summarizes the contribution of the paper: “First, we introduce and formulate the MC problem for robot missions, which is distinct to the well-known problem of multi-robot coverage due to its requirement on simultaneous image capturing. Second, we propose a method for computing the constellations and planning the UAV mission for the stereo case. Third, we realize a distributed, model-predictive controller for UAV motion execution and evaluate its performance for stereo coverage in a 3D simulation environment.”
The mission is executed as a leader-follower formation flight, where the leader UAV knows the absolute pose and the follower UAV performs vision-based relative pose estimation with downward facing cameras. “Our MPC control structure achieves accurate relative positioning and a stable formation flight when the UAVs are approaching their constellation poses which represent important phases of the mission”, Matthias Weyrer explains. As can be seen in our simulation experiments, synchronicity and formation deteriorate immediately after the next constellation poses are set. “This is a consequence of the linear model of our MPC structure. However, such simplified models are important for efficient onboard execution”, Matthias Weyrer concludes.
Matthias Weyrer and Bernhard Rinner. UAV Motion Planning and Control for Multi-Coverage of 3D Environments. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS’18), Dallas, TX, USA. June 2018.